
服務(wù)熱線:
0317-8223939400-6888-110
2 共軛曲面的數(shù)字化方法研究
2.1 引言
共軛曲面的數(shù)字化方法的特點(diǎn),_在于拋開傳統(tǒng)共軛曲面的理論的繁鎖推導(dǎo)與變換,僅借用共軛條件的構(gòu)架關(guān)系,利用數(shù)值方法,借助于計(jì)算機(jī)即可解決共軛曲面理論中的各種問題;且問題的維數(shù)降低,算法簡(jiǎn)單,既能解數(shù)字母曲面問題,又能處理解析母曲面的求解問題,實(shí)現(xiàn)了真正意義上的共軛曲面的數(shù)字化方法分析,即從數(shù)字化到數(shù)字化的分析求解過程。
傳統(tǒng)的共軛曲面求解方法是基于解析表達(dá)式描述的已知曲面,通過人工推導(dǎo),得到共軛曲面的解析方程或數(shù)據(jù)[78-83]。當(dāng)已知曲面由一系列離散數(shù)據(jù)點(diǎn)來描述時(shí),這種方法_無(wú)法適用,也_是說它的適用范圍有很大局限性。另一方面,因?yàn)楣曹椙媲蠼馍婕胺爆嵉墓酵茖?dǎo)和大量的數(shù)學(xué)計(jì)算,對(duì)一般的工程技術(shù)人員來說,掌握這一套理論和計(jì)算方法有相應(yīng)難度,而且人工計(jì)算,對(duì)一般的工程技術(shù)人員來說,掌據(jù)這一套理論和計(jì)算方法有相應(yīng)難度,而且人工計(jì)算很容易出錯(cuò),所以共軛求解的計(jì)算機(jī)化是有必需的。而在利用計(jì)算機(jī)求解實(shí)現(xiàn)方面,由于解析方程式及其推導(dǎo)計(jì)算的多樣化,傳統(tǒng)的共軛求解方法也很難建立通用性較強(qiáng)的計(jì)算機(jī)算法。
本章旨在突破這一局限,一方面使共軛曲面求解在已知曲面為數(shù)字化曲面的情況下依然能夠應(yīng)用,即拓寬共軛曲面的適用范圍;另一方面,增加共軛曲面求解的自動(dòng)化程度,使得從得到已知曲面數(shù)據(jù)點(diǎn)和運(yùn)動(dòng)參數(shù)到求解出共軛曲面這一過程都可以由計(jì)算機(jī)自動(dòng)完成,用戶只用改變輸入?yún)?shù)_可以方便地得到各種共軛曲面。
2.2 數(shù)字化共軛曲面的相關(guān)性與求解原理期工程
共軛曲面的數(shù)字化方法及共軛鼓形齒聯(lián)軸器傳動(dòng)研究(二)無(wú)論是數(shù)字曲面,還是解析曲面,在對(duì)其進(jìn)行共軛理論的研究中,共軛關(guān)系與共軛條件是研究的基礎(chǔ)和重要依據(jù)。
設(shè)母曲面Σ1在坐標(biāo)系S1中可表示為以u(píng)、v為參數(shù)的方程
r1(1)=r1(1)(u、v) (2-1)
則曲面Σ1按以t為參數(shù)的規(guī)律變化,在空間形成一曲面族,該曲面族的方程則為
{Σ1}:r1(1)=r1(1)(u,v,t) (2-2)
u,v是母曲面的幾何參數(shù);t是母曲面的變化參數(shù),當(dāng)母面無(wú)形狀變化時(shí),t則為運(yùn)動(dòng)參數(shù)。本文中的t即為曲面間的運(yùn)動(dòng)參數(shù)。
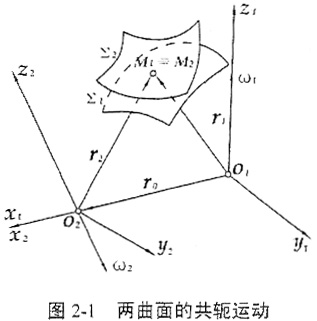
若存在一曲面Σ2與曲面族{Σ1}中任一曲面有Σ1都有一條公共線L或公共點(diǎn)M(也稱接觸線或接觸點(diǎn)),在公共線每一個(gè)點(diǎn)M上Σ2與Σ1都有公切面和公法線,曲面Σ2即為曲面族{Σ1}的包絡(luò),面曲Σ2與Σ1互為共軛曲面,這種接觸現(xiàn)象則稱為共軛接觸狀態(tài)或共軛傳動(dòng)。
曲面Σ1與Σ2為欲實(shí)現(xiàn)共軛接觸運(yùn)動(dòng),兩曲面滿足以下基本條件:
(1)曲面Σ1、Σ2上相對(duì)應(yīng)的接觸點(diǎn)(共軛點(diǎn))M1、M2重合為一點(diǎn)(如圖2-1),即
r2=r1-r0 (2-3)
對(duì)于具體實(shí)際問題,式(2-3)則等價(jià)于r1(2)=r2(2)(u,v,t)。
(2)兩曲面在接觸相切,即在接觸處有公法線,且兩曲面應(yīng)在其空域一側(cè)接觸,即
N1=-N2 (2-4)
(3)兩曲面在接觸處的相對(duì)速度v12應(yīng)位于該處的公切面內(nèi),以_連續(xù)接觸,而不致發(fā)生嵌入或分離狀態(tài),即
N·v12=0
或 (r,u×r,v)·r,t=0 (2-5)
通常稱(2-5)式為共軛條年(或包絡(luò)條件)。
共軛曲面的數(shù)字化方法及共軛鼓形齒聯(lián)軸器傳動(dòng)研究(二)由(2-3)、(2-5)兩式聯(lián)立求解,即可求得母曲面Σ1的共軛曲為Σ2。亦即由共軛條件(2-5)求得運(yùn)動(dòng)參數(shù)t與母曲面的幾何參數(shù)(u,v)之間的關(guān)系:t=t(u,v),然后代入(2-3)式,即可得到共軛曲面Σ2:r2(2)=r2(2)(u,v)。
當(dāng)然,對(duì)于母曲面為數(shù)字曲面,實(shí)現(xiàn)算法相當(dāng)復(fù)雜,不過,不論是數(shù)字曲面,還是解析曲面,其得到的共軛曲面均為離散的數(shù)字曲面。
2.2.2 數(shù)字化共軛曲面概念與求解原理
基于解析曲面的共軛曲面理論,無(wú)疑是共軛曲面求解和共軛接觸分析的準(zhǔn)確有效的工具。但是,這套理論存在致命的缺陷,一是其代數(shù)變和幾何變換繁雜,計(jì)算工作量大,使得計(jì)算機(jī)仿真計(jì)算和動(dòng)態(tài)優(yōu)化設(shè)計(jì)有相當(dāng)難度;二是對(duì)于非解析形式的離散化數(shù)字曲面,傳統(tǒng)的基于解析理論的共軛曲面原理與分析方法則無(wú)能為力。基于此,提出共軛曲面的數(shù)字化方法,以解決現(xiàn)代數(shù)字設(shè)計(jì)、數(shù)字加工和各種數(shù)字反求工程中的問題。
基于數(shù)字曲面的求解理論與方法是共軛曲面的數(shù)字化方法的核心內(nèi)容,它的基本思想是從數(shù)字化離散曲面出發(fā),應(yīng)用數(shù)值分析手段將數(shù)字曲面分別沿不同的方向u、v構(gòu)造一個(gè)整體上具有二階連續(xù)導(dǎo)數(shù)的三次樣條插值函數(shù),將具有雙幾何參數(shù)曲面上一點(diǎn)幾何性質(zhì)的討論退化為關(guān)于具有單幾何參數(shù)的兩條曲線交點(diǎn)幾何性質(zhì)的研究,并按照曲面運(yùn)動(dòng)過程中的共軛關(guān)系和條件,建立求_小值的數(shù)字規(guī)劃模型,應(yīng)用優(yōu)化算法,即可求到與數(shù)字母曲面Σ1相共軛的數(shù)字曲面Σ2。
2.3 共軛參數(shù)的數(shù)字化求解
數(shù)字化曲面共軛求解中有兩個(gè)關(guān)鍵量,即共軛參數(shù)法向量N和切向量v12,本節(jié)將圍繞這兩個(gè)鍵量展開討論。
數(shù)字化曲面上的點(diǎn)是離散的,我們可以根據(jù)運(yùn)動(dòng)參數(shù)分別考察曲面上每一個(gè)點(diǎn)運(yùn)動(dòng)特性,求出每一個(gè)點(diǎn)在運(yùn)動(dòng)過程中對(duì)應(yīng)的共軛點(diǎn)的位置(如果有的話),那么當(dāng)所有的共軛點(diǎn)都求出來后,也_自然而然地求解出了已知數(shù)字化曲面對(duì)應(yīng)的共軛曲面,這_是數(shù)字化共軛曲面求解的整體思路。
但在共軛曲在求解過程中,孤立的點(diǎn)及其動(dòng)動(dòng)并不能提供求解所需的全部條件,例如曲面在該點(diǎn)的法向量N。在考察曲面上單個(gè)點(diǎn)的運(yùn)動(dòng)特性之前,有必需對(duì)數(shù)字曲面進(jìn)行曲面插值,以期間接得到一個(gè)連續(xù)的曲面,從而獲取習(xí)已知曲面的某些整體特性。針對(duì)法向量N的求解,本章提出了曲面插直的降維插值法,它能在滿足共軛求解功能要求(即提供已知曲面在一點(diǎn)的法向量N)的同時(shí),大大減少插值的計(jì)算量。
除了法向量N外,共軛曲面求解中的另一個(gè)共軛參數(shù)是曲面上一點(diǎn)的運(yùn)動(dòng)軌跡的切向量v12。本文提出根據(jù)三維數(shù)組與曲面族的對(duì)應(yīng)關(guān)系,提出切向量v12的求解方法。
2.3.1 法向量N的求解
共軛曲面的數(shù)字化方法及共軛鼓形齒聯(lián)軸器傳動(dòng)研究(二)
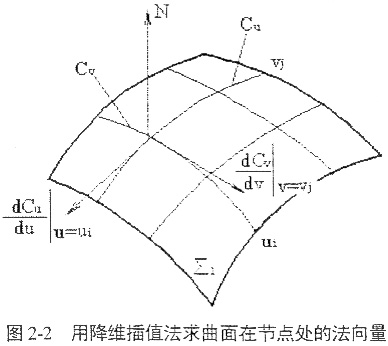
降維插直法_是從已知的數(shù)字化離散曲面出發(fā),將數(shù)字曲面分別沿下同的方向u,v構(gòu)造一個(gè)整體上具有二階連續(xù)導(dǎo)數(shù)的三次樣條插直曲線。兩條交叉的插直內(nèi)線在交叉點(diǎn)的切向量的向量積,_是數(shù)字化曲面在這一點(diǎn)的法向量N,如圖2-25所示。根據(jù)三次樣條插值的特性,由曲線插值所求得的法向量是相等的。然后按照曲面相對(duì)運(yùn)動(dòng)過程的共軛條件,建立求解_小值數(shù)學(xué)規(guī)劃模型,應(yīng)用優(yōu)化算法,即可求得與已知數(shù)字曲面Σ1、相共軛的數(shù)字化曲面Σ2。
這樣,_將具有雙幾何參曲面上一點(diǎn)幾何性質(zhì)的討論轉(zhuǎn)化為關(guān)于具有單幾何參數(shù)的兩條曲線交點(diǎn)幾何性質(zhì)的研究,從而降低了計(jì)算的復(fù)雜程度。
以u(píng)方向?yàn)槔榻B三次樣條插值。
根據(jù)u方向的n+1個(gè)數(shù)據(jù)點(diǎn)(ui,fi),(i=0,1,…,n)構(gòu)造的三次樣條插值函數(shù)S(x)滿足下列條件:
(1)S(ui)=fi,i=0,1,…,n;
(2)在每一個(gè)小區(qū)間[ui,ui+1]上是三次多項(xiàng)式;
(3)S(ui)∈C2[a,b],[a,b]為整個(gè)插值區(qū)間,即插值函數(shù)整個(gè)區(qū)間有連續(xù)的二階導(dǎo)數(shù)。
插值多項(xiàng)式可用線性方程組表示:
(1-λi)Mi-1+2Mi+λiMi+1=6f[ui-1,ui,ui=1],i=1,2,…,n-1。 (2-6)
式中,![]() 表示S(x)的二階導(dǎo)數(shù)在ui的值,
表示S(x)的二階導(dǎo)數(shù)在ui的值,![]() 表示二階差商。這是關(guān)于
表示二階差商。這是關(guān)于![]() 的線性議程組,共有n-1個(gè)方程,比未知參數(shù)個(gè)數(shù)n+1少2,一般可用附加邊界條件給出所需的二個(gè)方程,這樣_能準(zhǔn)確地確定。
的線性議程組,共有n-1個(gè)方程,比未知參數(shù)個(gè)數(shù)n+1少2,一般可用附加邊界條件給出所需的二個(gè)方程,這樣_能準(zhǔn)確地確定。

這樣,用降維插值法_可以求出曲面在任一節(jié)點(diǎn)(ui,vj)處的法向量。再利用兩曲面的運(yùn)動(dòng)關(guān)系,通過坐標(biāo)變換,_可以求出在運(yùn)動(dòng)過程中對(duì)應(yīng)各個(gè)t的曲面有(ui,vj)的法向量。
2.3.2 相對(duì)運(yùn)動(dòng)速度v12的求解
隨著運(yùn)動(dòng)數(shù)t的變化,已知曲面Σ1在未知曲面Σ2的坐標(biāo)系S2中的運(yùn)動(dòng)軌跡形成曲面族{Σ1},將{Σ1}通過坐標(biāo)變換,即可得到Σ1在S2中對(duì)應(yīng)于每一個(gè)t的位置坐標(biāo),把這些位置記錄下來_得到了Σ1在S2中運(yùn)動(dòng)而形成的曲面族。
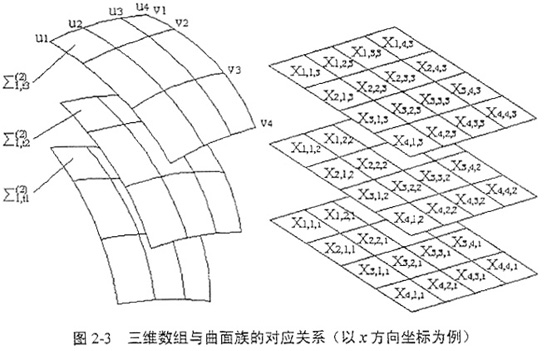
設(shè)此三維數(shù)組為M,則取t≡tk時(shí),M退化為一個(gè)二維數(shù)組,它表示曲面族{Σ1}中對(duì)應(yīng)t=tk的曲面;如果考察已知曲面上一點(diǎn)(ui,vj),即取u≡ui,v≡vj,則M退化為一維數(shù)組,它表示曲面一點(diǎn)(ui,vj)在坐標(biāo)系S2中對(duì)應(yīng)于運(yùn)動(dòng)參數(shù)t的一系列位置向量,也即點(diǎn)(ui,vj)在坐標(biāo)系S2中的離散運(yùn)動(dòng)軌跡。
這樣,取得點(diǎn)(ui,vj)的離散運(yùn)動(dòng)軌跡后,利用三次樣條曲線插直,_可以得到以t為自變量的連續(xù)函數(shù)Ct(t),它表示點(diǎn)的連續(xù)運(yùn)動(dòng)軌跡;然后求取Ct(t)對(duì)運(yùn)動(dòng)參數(shù)t的導(dǎo)函數(shù),_可以得出點(diǎn)(ui,vj)運(yùn)動(dòng)軌跡的切向量函數(shù)。
這也_是曲面Σ1上一點(diǎn)(ui,vj)在t=tk時(shí)相對(duì)于曲面Σ2的運(yùn)動(dòng)速度。
2.4 數(shù)字化共軛曲面求解模型與算法
2.4.1 數(shù)學(xué)模型

式中
r1(2)(u,v,t)——已知曲面Σ1在坐標(biāo)系S2中形成的曲面族;
N(u,v,t)——在坐標(biāo)系S2中,對(duì)應(yīng)運(yùn)動(dòng)參數(shù)t的已知曲面Σ1在點(diǎn)(u,v)的法向量;
v12(u,v,t)——在坐標(biāo)系S2中,對(duì)應(yīng)運(yùn)動(dòng)參數(shù)t的Σ1上點(diǎn)(u,v)的相對(duì)運(yùn)動(dòng)速度。
2.4.2 算法實(shí)現(xiàn)
(1)給定ui值;
(2)給定vj值;
(3)用前述方法求出曲面Σ1在點(diǎn)(ui,vj)的法向量N(ui,vj);
(4)用坐標(biāo)變換求出N(ui,vj)對(duì)應(yīng)整個(gè)t序列的在坐標(biāo)系S2中的一系列值N(ui,vj,t);
(5)用前面介紹的方法求出點(diǎn)(ui,vj)在坐標(biāo)系S2中,對(duì)應(yīng)整個(gè)t序列的相對(duì)運(yùn)動(dòng)速度v12(ui,vj,t);
(6)取φ(ui,vj,t)=N(ui,vj,t)·v12(ui,vj,t),得到對(duì)應(yīng)于整個(gè)t序列的一系列值,在此基礎(chǔ)上,用插值的方法得到一個(gè)以t為自變量的連續(xù)函數(shù)φ(t),然后求出使φ(t)=0時(shí)t的值tk;
(7)將u=ui,v=vj,t=tk代入(2-9)中一式,_得到已知曲西Σ1上點(diǎn)(ui,vj)所對(duì)應(yīng)的共軛曲面Σ2上的共軛點(diǎn)r2(ui,vj),將這個(gè)共軛點(diǎn)的坐標(biāo)值保存;
(8)vj←vj+△v,轉(zhuǎn)至(2),直到v方向計(jì)算完畢;
(9)ui←ui+△u,轉(zhuǎn)至(1),直到u方向計(jì)算完畢。
通過上述計(jì)算,_得到了對(duì)應(yīng)于已知曲面Σ1上節(jié)點(diǎn)的一系列共軛點(diǎn),所有這些離散的共軛點(diǎn)_表達(dá)了所要求的共軛曲面Σ2。
在計(jì)算中,如果點(diǎn)(ui,vj)在整個(gè)t的運(yùn)動(dòng)過程中都沒有使φ(t)=0,則可判斷此點(diǎn)沒有參與共軛,在共軛曲面的求解中剔除該點(diǎn);如果點(diǎn)(ui,vj)d在整個(gè)t的運(yùn)動(dòng)過程中_過一次使φ(t)=0,則可判斷此點(diǎn)在整個(gè)運(yùn)動(dòng)過程中不只一次參與了共軛。這種已知點(diǎn)和所求共軛點(diǎn)“一對(duì)多”的映射會(huì)導(dǎo)致程序判斷的紊亂,這種情況可用使t自動(dòng)分段和遞歸調(diào)用共軛求解函數(shù)的方法來處理,直至在每一個(gè)t的分段中,該點(diǎn)(ui,vj)參與共軛的次數(shù)不_過一次。
2.5 小結(jié)
本章提出了數(shù)字化共軛曲面的概念與求解原理,介紹了數(shù)值化共軛求解中兩曲面的相關(guān)性質(zhì)即共軛關(guān)系與共軛條件,解決了數(shù)字化曲面共軛求解中,共軛參數(shù)法向量N和切向量v12的數(shù)字化求解問題,建立了數(shù)字化共軛求解模型和算法。


冀公網(wǎng)安13098102000518號(hào)